
Hermed yderligere instruktioner til at bygge robotten beskrevet i http://blog.ecolefrancodanoise.dk/model-moms:
Når man har bygget Merkur chassis’et, har man brug for (fra venstre mod højre i nedenstående billede):
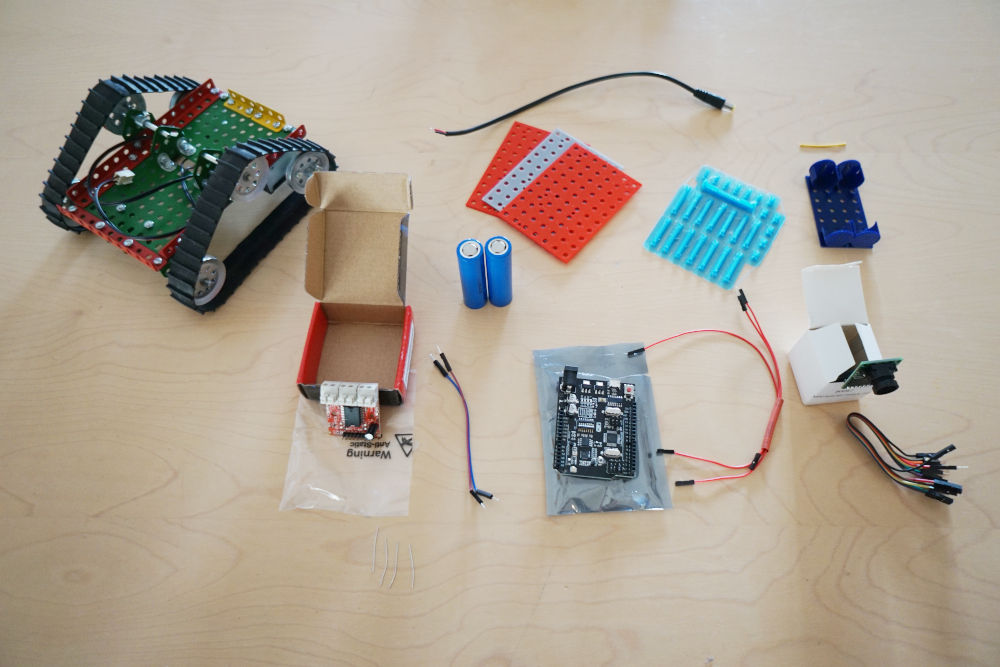
- motor controller
- fire metaltråde à ca. 3 cm
- to han-han ledninger
- to batterier af typen 18650
- tre hulplader (til type 1. Type 2 kræver kun een plade.)
- ledning til strømforsyningen
- microcontroller med wifi
- ledninger til at lave en “blæksprutte”
- 3D-printede konnektorer til at samle pladerne
- æske med kamera og otte han-hun ledninger
- 3D-printet batteriholder
- 4 cm ledning til batteriholderen (afisoleres ca. 1 cm i hver ende)
Microcontrollerens wifi-system skal opdateres. Det er ret let, når man ved hvordan, man skal nemlig bare køre opdateringsscriptet. Hvis man ikke har prøvet den slags før, må man lige tage fat i nogen, der har.
Man skal også programmere microcontrolleren til at fungere som en Dark Side Rover-robot, herunder angive navn og kode til det wifi access point, som robotten skal bruge, samt angive dens kaldenavn. Har man ikke prøvet det før heller, er det en god idé at få lidt hjælp.
Derefter kan man styre sin robot fra nettet ved at taste kommandoer ind i kommandointerfacet. Man kan også følge med i de andre robotters gøren og laden, hvis man kender deres navn. OBS: det er god tone ikke at styre andres robotter, medmindre man har fået lov.
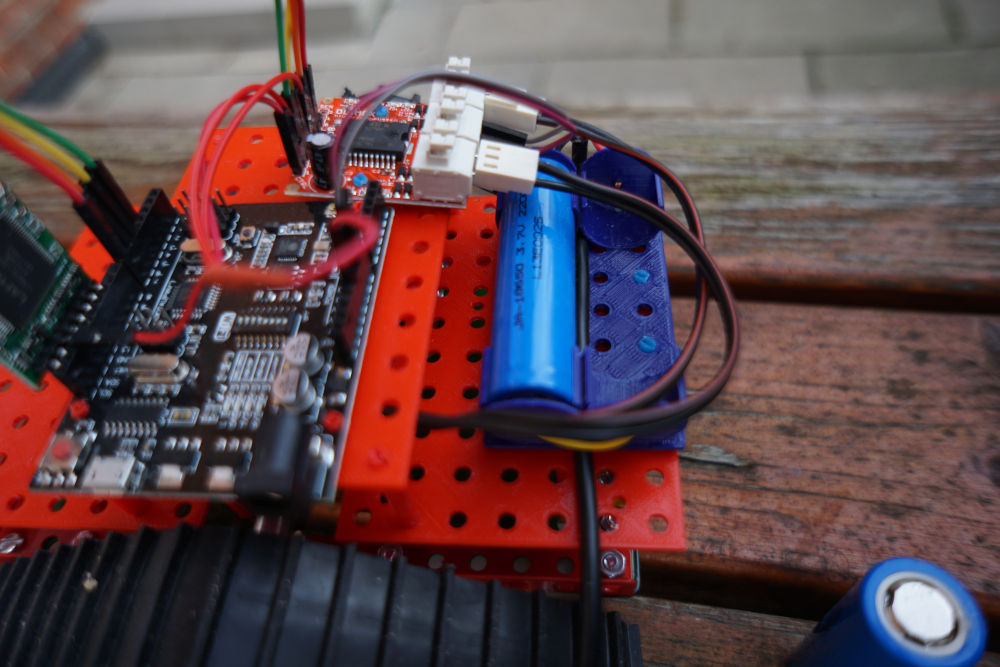
De 3D-printede konnektorer, der holder pladerne sammen, er lidt svære at tvinge igennem pladernes huller. Man kan her bruge en fladtang til at give dem et lille(!) klem. Hvis nogen kan finde på et genialt koncept, der egner sig bedre til børnefingre (eller robotfingre), ville det være et kærkomment bidrag.
Man kan lave sine egne 3D-designs vha. OpenSCAD, og skolens nuværende designs kan downloades på gitlab og få dem printet på skolen.